Elektrik Motorları

1. Aşırı Yüklenme (Overload)
-
Neden: Motorun nominal gücünün üzerinde bir yükle çalıştırılması.
-
Sonuç: Aşırı akım çeker, sargılar ısınır ve izolasyon bozulur.
-
Önlem:
-
Yükün motor kapasitesine uygun olup olmadığını kontrol etmek.
-
Termik röle veya akım koruma rölesi kullanmak.
-
2. Faz Eksikliği (Tek Fazda Çalışma)
-
Neden: Üç fazlı motorlarda bir fazın kesilmesi veya kopması.
-
Sonuç: Motorun kalan iki faza aşırı yük binmesine neden olur. Sargılar dengesiz ısınır ve yanabilir.
-
Önlem:
-
Faz koruma rölesi kullanmak.
-
Klemens bağlantılarını düzenli kontrol etmek.
-
3. Düşük Gerilim veya Yüksek Gerilim
-
Neden: Besleme geriliminin nominal değerinden düşük veya yüksek olması.
-
Düşük gerilim: Motor daha fazla akım çeker, bu da aşırı ısınmaya neden olur.
-
Yüksek gerilim: İzolasyon malzemelerinin zarar görmesine neden olabilir.
-
-
Sonuç: Motorun sargıları aşırı akım nedeniyle yanabilir.
-
Önlem:
-
Şebeke gerilimini düzenli kontrol etmek.
-
Voltaj dalgalanmalarına karşı gerilim regülatörü veya kompanzasyon sistemleri kullanmak.
-
4. Düşük veya Yüksek Frekanslı Çalışma
-
Neden: Frekansın nominal değerden sapması (örneğin, 50 Hz yerine 40 Hz veya 60 Hz’de çalıştırmak).
-
Sonuç: Motorun manyetik akısı değişir, verimi düşer ve ısınma artar.
-
Önlem:
-
Frekans kontrol cihazı (VFD) kullanırken uygun ayarları yapmak.
-
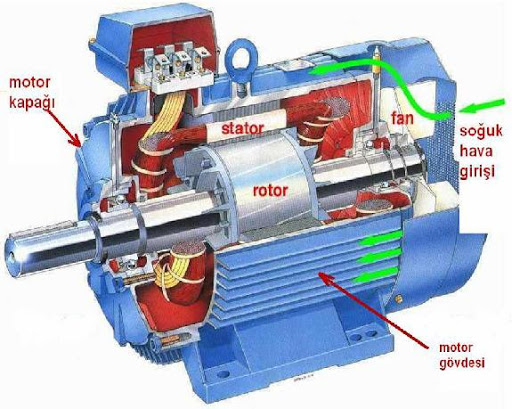
5. Rotor veya Statorun Havalandırmasının Yetersiz Olması
-
Neden: Motor fanının arızalanması, toz ve kir birikmesi, havalandırma kanallarının tıkanması.
-
Sonuç: Motorun yeterince soğuyamaması, sıcaklığın artması ve izolasyonun zarar görmesi.
-
Önlem:
-
Motorun soğutma sistemini düzenli temizlemek.
-
Ortam sıcaklığını ve havalandırmayı kontrol etmek.
-
6. Kısa Devre ve İzolasyon Arızaları
-
Neden: Motor sargılarının izolasyonunun yaşlanması, nem, yağ veya metal tozlarının sargılar üzerine birikmesi.
-
Sonuç: Fazlar arası veya gövdeye karşı kısa devre meydana gelir, motor yanar.
-
Önlem:
-
İzolasyon direncini düzenli ölçmek (Megger testi).
-
Motoru nemli ve kirli ortamlardan korumak.
-
7. Ani Yük Değişimleri
-
Neden: Motorun bağlı olduğu mekanik sistemde aniden yük değişimi olması (örneğin bir pompanın veya konveyörün ani durup tekrar çalıştırılması).
-
Sonuç: Motorun ani akım çekmesine neden olur, ısınma ve sargı yanmaları meydana gelebilir.
-
Önlem:
-
Yumuşak yol verici (soft starter) veya inverter kullanmak.
-
8. Yanlış Bağlantı (Yıldız-Üçgen Hatası)
-
Neden:
-
Motorun yanlış bağlantı tipinde çalıştırılması (örneğin, üçgen çalıştırılması gereken motorun yıldız bağlanması).
-
Yanlış faz sırası veya bağlantı hataları.
-
-
Sonuç: Motor fazla akım çekebilir veya aşırı ısınabilir.
-
Önlem:
-
Motor bağlantılarının şemaya uygun yapıldığını kontrol etmek.
-
9. Başlangıç Problemleri (Sık Açma-Kapama)
-
Neden: Motorun çok sık çalıştırılıp durdurulması.
-
Sonuç: Motor her kalkışta yüksek akım çeker, bu da sargıların fazla ısınmasına neden olur.
-
Önlem:
-
Motoru kontrolsüz sık açma-kapamadan kaçınmak.
-
İnverter veya soft starter kullanarak kontrollü kalkış sağlamak.
-
10. Rulman ve Mekanik Arızalar
-
Neden: Rulmanların aşınması, yanlış yağlama veya yataklama hataları.
-
Sonuç: Rotor düzgün dönemez, sürtünme artar ve sıcaklık yükselir. Sonuç olarak sargılar yanabilir.
-
Önlem:
-
Rulmanların periyodik bakımını yapmak.
-
Uygun yağlama yöntemlerini kullanmak.
-
Sonuç ve Önleyici Bakım Önerileri
Asenkron motorların yanmasını önlemek için şu önlemler alınmalıdır:
✅ Periyodik bakım yapılmalı, motor sıcaklıkları ve akımları takip edilmelidir.
✅ Termik röle, faz koruma rölesi ve aşırı akım rölesi gibi koruma sistemleri kullanılmalıdır.
✅ Yük ve motor kapasitesi uyumlu olmalıdır.
✅ İzolasyon testleri düzenli olarak yapılmalıdır (Megger testi).
✅ Motorun temizliği ve soğutma sistemleri düzenli kontrol edilmelidir.
Bu önlemler alınmazsa motorun sargıları aşırı ısınıp izolasyonu bozulur ve sonunda yanarak kullanılamaz hale gelir.
1. Yanlış Frekans ve Gerilim Ayarları
-
Neden:
-
İnverterin çıkış frekansı motorun nominal değerine uygun değilse motor aşırı akım çekebilir.
-
Gerilim/frekans (V/f) eğrisi yanlış ayarlanmış olabilir.
-
Düşük frekansta yüksek yük ile çalıştırma motorun aşırı ısınmasına neden olabilir.
-
-
Sonuç:
-
Motor verimli çalışmaz, fazla akım çeker ve ısınarak yanabilir.
-
-
Önlem:
✅ Motorun etiket değerlerine uygun frekans ve gerilim ayarlamalarını kontrol edin.
✅ İnverterin otomatik voltaj regülasyonu (AVR) özelliği varsa aktif edin.
2. Yüksek Anahtarlama Frekansı (PWM Etkisi ve İzolasyon Problemi)
-
Neden:
-
İnverterler, çıkışlarını darbeli genişlik modülasyonu (PWM) ile kontrol eder.
-
Yüksek anahtarlama frekansı, motor sargılarında ekstra gerilim stresine neden olabilir.
-
Bu durum özellikle eski motorlarda izolasyonun delinmesine yol açabilir.
-
-
Sonuç:
-
Motor sargıları yüksek frekanslı darbelerden dolayı yıpranır ve kısa devre olur.
-
-
Önlem:
✅ İnverterin anahtarlama frekansını motorun nominal değerine uygun şekilde düşürün (genellikle 3-8 kHz arası idealdir).
✅ Eğer uzun kablo kullanıyorsanız, inverter ile motor arasına bir sinüs filtresi (du/dt filtresi) ekleyin.
3. İnverterin Aşırı Yüklenmesi (Motor Aşırı Akım Çekiyor)
-
Neden:
-
Motorun yükü inverterin kapasitesinin üzerinde olabilir.
-
Motor düşük hızlarda uzun süre çalıştırılmış olabilir (soğutma yetersiz kalır).
-
İnverterin aşırı akım koruma ayarları düzgün yapılandırılmamış olabilir.
-
-
Sonuç:
-
Motor sürekli yüksek akım çektiği için sargılar aşırı ısınır ve izolasyonu bozulur.
-
-
Önlem:
✅ İnverterin aşırı akım koruma ayarlarını (overcurrent protection) kontrol edin.
✅ Motorun nominal akımına uygun akım sınırı belirleyin.
4. Motor ile İnverter Arasındaki Kablo Uzunluğu (Gerilim Dalgalanmaları)
-
Neden:
-
İnverter çıkışı ile motor arasındaki kablo çok uzun olduğunda, motor uçlarında yüksek gerilim tepe değerleri (spike) oluşabilir.
-
Özellikle 50 metre ve üzeri kablo uzunluklarında motor sargılarına zarar verebilir.
-
-
Sonuç:
-
Motorun izolasyonu zarar görerek sargılar kısa devre olur.
-
-
Önlem:
✅ İnverter ile motor arasındaki kablo uzunluğunu kısaltın veya du/dt filtresi ekleyin.
✅ İnverter çıkışına uygun motor seçin (VFD uyumlu motorlar tercih edin).
5. İnverterin Taşıdığı Harmonikler (Elektriksel Gürültü ve Rulman Akımları)
-
Neden:
-
İnverterler, motorun çalışmasını sağlayan kare dalga veya darbe genişlik modülasyonu (PWM) sinyalleri üretir.
-
Bu harmonikler rulmanlarda elektriksel boşalma (bearing current) oluşturabilir.
-
Uzun vadede motor rulmanlarını bozarak rotorun yanlış hizalanmasına ve sargıların zarar görmesine neden olabilir.
-
-
Sonuç:
-
Motor rulmanları zamanla aşınır, dengesiz çalışmaya başlar ve aşırı ısınarak yanar.
-
-
Önlem:
✅ Topraklama ve ekranlı kablo kullanarak harmonik etkisini azaltın.
✅ İzole rulmanlar veya rulman topraklama halkası (shaft grounding ring) kullanın.
✅ Harmonik filtreler ekleyin.
6. Termistör veya Aşırı Isınma Koruma Kullanılmaması
-
Neden:
-
Motor sargılarında sıcaklık arttığında, inverterin bunu algılayarak motoru durdurması gerekir.
-
Ancak, motor sıcaklık sensörü (termistör) devreye bağlanmadıysa, inverter sıcaklığı algılayamaz.
-
-
Sonuç:
-
Motor aşırı ısınır ve yanar.
-
-
Önlem:
✅ Motor termistör bağlantısını inverter girişine bağlayın ve aşırı sıcaklık korumasını etkinleştirin.
7. Frenleme Direnci veya Fren Ünitesinin Eksikliği (Ani Durma ve Kalkış Problemleri)
-
Neden:
-
Büyük yüklerde motor ani durdurulduğunda, motor jeneratör gibi çalışarak invertere yüksek gerilim geri besleyebilir.
-
İnverter bu enerjiyi harcayamazsa, motor ani akım yüklenmesine maruz kalabilir.
-
-
Sonuç:
-
Sargılarda aşırı akım ve gerilim yükselmesi nedeniyle motor yanabilir.
-
-
Önlem:
✅ Frenleme direnci veya dinamik fren ünitesi kullanın.
✅ İnverterin rampa süresini (deceleration time) artırarak motoru kademeli durdurun.
SONUÇ
Eğer inverter kullanmanıza rağmen motor yandıysa, şu kritik faktörleri gözden geçirmeniz gerekir:
✔️ İnverter çıkış frekans ve gerilim ayarlarını motor etiketine uygun hale getirin.
✔️ Anahtarlama frekansını düşürerek motor sargılarındaki stresleri azaltın.
✔️ İnverter ile motor arasındaki kablo uzunluğunu kontrol edin ve gerekiyorsa du/dt filtresi ekleyin.
✔️ Motorun nominal akımına uygun aşırı akım koruması ve sıcaklık sensörlerini aktif hale getirin.
✔️ Frenleme direnci ekleyerek motorun ani durmalarını kontrol altına alın.
Eğer tekrar bir yanma yaşandıysa, VFD uyumlu motor seçerek ve inverter ayarlarını optimize ederek bu sorunun önüne geçebilirsiniz.
Elektrik motorlarına yol verme yöntemleri, motorun ilk çalıştırma anında çektiği yüksek kalkış akımını sınırlandırmak, mekanik zorlanmaları azaltmak ve sistemi güvenli şekilde devreye almak için seçilir.
İşte en yaygın elektrik motoru yol verme yöntemleri, avantaj ve dezavantajlarıyla birlikte:
⚙️ ELEKTRİK MOTORU YOL VERME YÖNTEMLERİ
1. Doğrudan Yol Verme (Direct-On-Line, DOL)
-
🔌 Motor tam şebeke gerilimiyle çalışır.
-
💥 Kalkış akımı: Nominal akımın 6-8 katı olabilir.
-
⚠️ Yüksek güç motorlarda tavsiye edilmez.
Avantaj:
-
Basit ve ucuz
-
Hızlı yol alma
Dezavantaj:
-
Yüksek kalkış akımı
-
Mekanik sistemde zorlanma
-
Şebekeye darbe
2. Yıldız-Üçgen Yol Verme (Star-Delta Starting)
-
🌀 Motor önce yıldız bağlıyken kalkış yapar, sonra üçgen bağlantıya geçer.
-
⚡ Kalkış akımı: Nominalin 2-3 katı olur.
Avantaj:
-
Düşük maliyet
-
Kalkış akımı azaltılır
Dezavantaj:
-
Sadece Dahili yıldız-üçgen bağlantılı motorlarda olur
-
Geçişte voltaj düşmesi, moment kaybı olabilir
-
Geçişte kontaktör senkronizasyon gerekir
3. Oto-Trafo Yol Verme (Autotransformer Starter)
-
🔧 Başlangıçta motor düşük gerilimle çalışır, sonra tam şebeke gerilimine geçer.
-
🔄 %50, %65, %80 gibi kademelerle kalkış yapılabilir.
Avantaj:
-
Kalkış akımı ve momenti kontrol edilebilir
-
Büyük güçlü motorlarda kullanılır
Dezavantaj:
-
Pahalı
-
Karmaşık devre yapısı
-
Motorun mekanik yüküne göre doğru kademe seçilmeli
4. Yumuşak Yol Verici (Soft Starter)
-
⚙️ Motorun gerilimi yavaşça artırılarak kalkış yapılır (SCR teknolojisi).
-
🌀 Tork ayarı, kalkış süresi ayarı yapılabilir.
Avantaj:
-
Düşük akım, düşük mekanik zorlanma
-
Kolay ayarlanabilir
-
Kontaktörsüz kalkış
Dezavantaj:
-
Sadece kalkışta ve duruşta kullanılır
-
Devredeyken harmonik oluşturabilir (filtre gerekebilir)
-
VFD kadar hassas hız kontrolü yoktur
5. Frekans Konvertörü (Inverter / VFD - Variable Frequency Drive)
-
⚡ Gerilim ve frekansı birlikte değiştirerek motoru yavaşça çalıştırır.
-
🔁 Sürekli hız kontrolü sağlar.
Avantaj:
-
En hassas kalkış ve duruş
-
Enerji tasarrufu sağlar (özellikle fan/pompa sistemlerinde)
-
Rejeneratif çalışma (bazı modellerde)
Dezavantaj:
-
Maliyetli
-
Harmonik üretir → filtre gerekebilir
-
Elektromanyetik girişim riskine karşı ekranlı kablo gerekir
6. Rotor Dirençli Yol Verme (Slip Ring Motorlar için)
-
⚙️ Rotor devresine direnç eklenir, sonra kademeli olarak çıkarılır.
Avantaj:
-
Ağır yüklerde yüksek torkla kalkış imkânı
-
Hassas moment kontrolü
Dezavantaj:
-
Sadece bilezikli (sargılı rotor) motorlarda
-
Bakımı zordur
-
Yeni sistemlerde nadir kullanılır
📊 Kıyas Tablosu
| Yöntem | Kalkış Akımı | Kalkış Moment | Maliyet | Kullanım Alanı |
|---|---|---|---|---|
| DOL | Yüksek (6–8×) | Yüksek | Düşük | Küçük motorlar |
| Yıldız-Üçgen | Orta (2–3×) | Düşük–Orta | Orta | Orta güçlü motorlar |
| Oto-Trafo | Ayarlanabilir | Ayarlanabilir | Yüksek | Büyük motorlar |
| Soft Starter | Düşük | Ayarlanabilir | Orta-Yüksek | Pompa, fan |
| VFD | Çok düşük | Ayarlanabilir | Yüksek | Fan, pompa, konveyör |
| Rotor Direnci | Ayarlanabilir | Yüksek | Orta-Yüksek | Vinç, ağır kaldırma |
1. Elektrik Motorlarında kW Sınırları (Yol Verme Yöntemine Göre)
| Yol Verme Yöntemi | Tipik kW Sınırı |
|---|---|
| Doğrudan (DOL) | < 5.5–7.5 kW (şebeke darbesi olmaması için) |
| Yıldız-Üçgen | 7.5–75 kW arası yaygın |
| Oto-Trafo | 75–250 kW arası |
| Soft Starter | 11–500+ kW (yük ve tork gereksinimine göre) |
| Frekans Konvertörü (VFD) | 0.37–1000+ kW (üst sınır üreticiye bağlı) |
⚡ 2. Elektrik Tesisatlarında kW Sınırları (Abonelik tipi ve sayaç)
| Abone Tipi | kW Sınırı | Açıklama |
|---|---|---|
| Mesken (monofaze) | ~5–6 kW | 25–32 A tek faz |
| Sanayi / Trifaze (Küçük İşletme) | 10–20–30 kW | 3×25–50 A |
| Sanayi / OSB Orta Gerilim (OG) | 160 kW+ | Genelde 160 kVA trafodan başlar |
| Kompanzasyon zorunluluğu | > 9 kW | Reaktif güç kontrolü zorunlu olur (3×25 A üstü) |
🏗️ 3. Projelendirme ve Elektrik Ruhsatlarında (Yapı Elektrik Projeleri)
| Yapı Türü | Trafo veya kW Eşiği | Açıklama |
|---|---|---|
| Konut | 6–10 kW | Genelde tek fazlı |
| AVM, Fabrika, Hastane | 160 kVA üzeri | OG abonelik, trafo zorunlu |
| Bina içi şaft sınırı | 33 kW üstü | Topraklama ve yangın önlemleri genişletilir |
📋 4. Kompanzasyon Panosu Gereksinimi (Reaktif Ceza Sınırı)
| Güç (kW/kVA) | Zorunluluk |
|---|---|
| > 9 kW (~12 kVA) | Kompanzasyon zorunlu |
| > 50 kVA | Reaktif izleme sistemi tavsiye edilir |
| > 100 kVA | Enerji analizörü şart |
⚠️ 5. Enerji Verimliliği ve MEVZUAT (VAP / EVD Projeleri)
| Amaç | Sınır | Açıklama |
|---|---|---|
| Enerji yöneticisi zorunluluğu | >1000 TEP/yıl tüketen tesis | Genelde 300–400 kW sürekli güç |
| VAP Projesi | ≥ 100 kW tasarruf potansiyeli | Devlet teşviki için minimum sınır |
🔌 6. Sigorta & Kablo Seçiminde kW Sınırları
| kW | Akım (A) | Önerilen Sigorta & Kablo |
|---|---|---|
| 5.5 kW | ~10 A (trifaze) | 3×2.5 mm², C16 otomat |
| 15 kW | ~30 A | 3×6 mm², C40 sigorta |
| 30 kW | ~60 A | 3×16 mm², C63/C80 sigorta |
| 75 kW | ~140 A | 3×50–70 mm², kompakt şalter gerekir |


Yorumlar
Yorum Gönder